热线电话
021-52658097

机器人与人工智能应用-ROV水下航行器

一、整机组成及功能
公司ROV水下航行器主要由ARM主控板、驱动及电源变换电路板、船仓及外壳、蓄电池、螺旋桨推进器、无刷电机驱动板、三轴陀螺仪模块、温度深度等传感器、摄像头、路由器及水上WIFI通讯模块组成。ROV水下航行器可通过手机APP控制在水下航行,航行器的前置摄像头可通过WIFI模块向手机传输视频数据,显示水下拍摄图像。
(一)整机组成
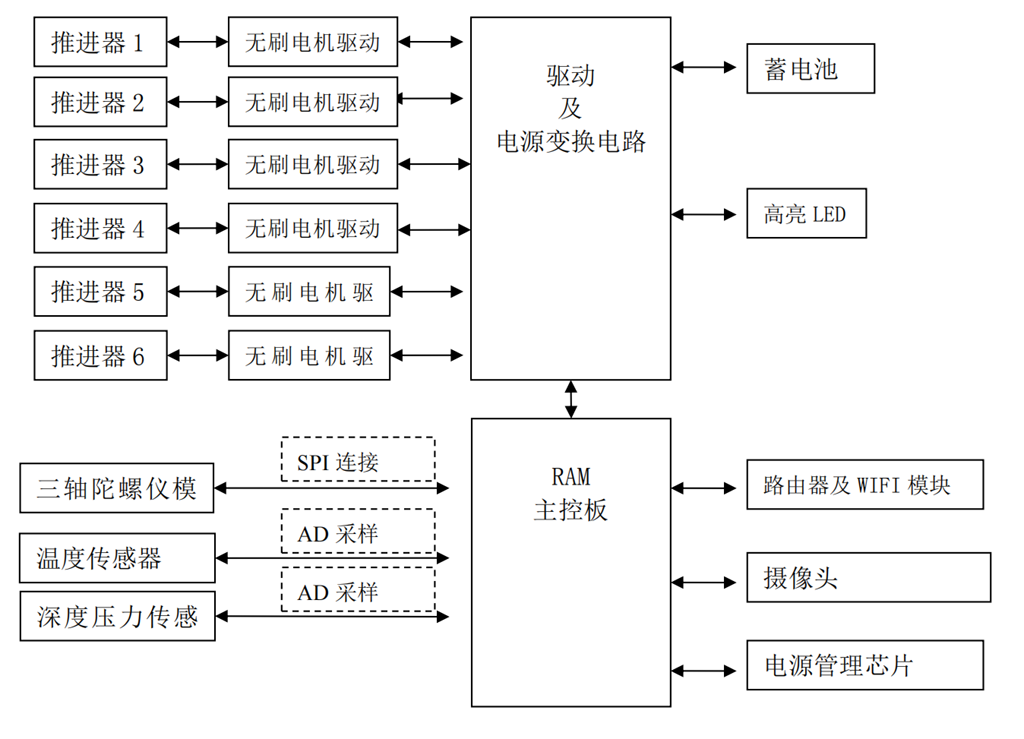
系统构成图
(二)整机功能
1. 水下航行及平衡控制
(1)水下可进行前进,后退,左移,右移,上浮,下潜,顺时针旋转,逆时针旋转,等运动控制。
(2)下潜深度:20米,提供深度数据
(3)速度6档可调,最低速度0.2米/秒,最高速度3米/秒。
(4)姿态感知:实时提供潜航器欧拉角、加速度和磁力计数据;
(5)偏航角<3°
(6)运动中横滚角<3°
(7)运动中俯仰角<3°
2.水下拍摄及视频传输:
(1)500万像素摄像头,自动对焦,分辨率 1280 * 720, 最大帧率30fps;
(2)水下照明方式:辅助照明,2个3000lumens灯泡如亮度不够可增加灯泡数量
(3)水下显示图像清晰。
(4)视频传输无延时,没有卡顿,显示流畅。
(5)视频显示分辨率,PC端1280 * 720,手机端320 *240
3.PC、手机端显示内容
(1)水下拍摄视频
(2)当前区域地图及ROV位置显示
(3)当前ROV姿态及深度
(4)ROV控制信息,包括控制方向,航行速度
(5)ROV电池余量百分比
二、技术实现
(一)各功能实现方法
(1)水下拍摄:摄像头与ARM通过DCMI总线连接,主控板采用KEIL编程后可以驱动摄像头工作;
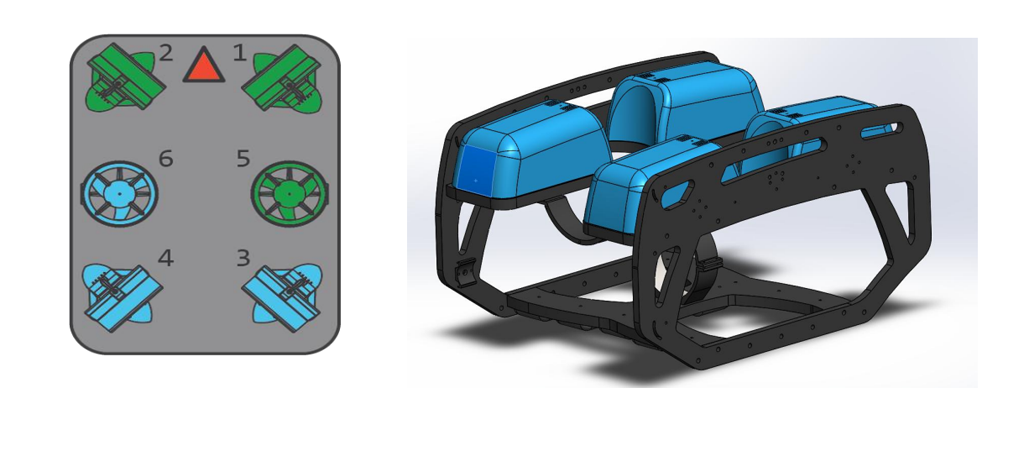
(2)水下航行:航行器内ARM主控板接收APP的控制指令,主控板通过网络接口芯片直接接受WIFI信息,主控板发送指令给飞控模块,飞控模块发送PWM波控制推进器航行。航行器前进、后退、左转、右转通过控制航行器周围四个螺旋桨推进器正转或反转实现。航行器侧倾姿态调整及上浮下潜推进由航行器中间的两个螺旋桨推进器正转或反转实现。
(3)远程通讯:ARM主控板与路由器模块通过以太网口连接,航行器内路由器模块与水上通讯模块内WIFI模块通过100M+电缆连接,水上通讯模块内部具备WIFI模块,通过无线与手机或PC通讯,传输信息。
(二)硬件设计
1. 自制ARM主控板
(1)采用ARM Cortex-M4 CPU;
(2)CPU内部含有292K SRAM,1MB FLASH存储容量;
(3)外部扩展4MB SDRAM和256MB FLASH;
(4)CPU含有168个I/O接口,12个定时器,一个8到14bit的摄像头并行接口和TCP/IP;
(5)CPU还带有8个定时器、若干PWM输出接口、USB接口、I2C、SPI、若干UART接口等等;
2. 摄像头:
(1) 采用1.4μm*1.4μm像素大小;
(2) 自动曝光(AEC)、自动白平衡(AWB)、自动消除灯光条纹、自动黑电平校准(ABLC)和自动带通滤波器(ABF);
(3) 支持图像质量控制,色饱和度调节、色调调节、gamma校准、锐度和镜头校准等;标准的SCCB接口,兼容IIC接口,支持RawRGB、RGB(RGB565/RGB555/RGB444)、CCIR656、YUV(422/420)、YCbCr(422)和压缩图像(JPEG)输出格式, 支持QSXGA(500W)图像尺寸输出,以及按比例缩小到其他任何尺寸;
(4) 支持闪光灯;
(5) 支持图像缩放、平移和窗口设置;支持图像压缩,即可输出JPEG图像数据;
(6) 支持数字视频接口(DVP)和MIPI接口;支持自动对焦;
(7) 自带嵌入式微处理器。
3. 压力传感器
(1) 分辨率:0.2mbar;
(2) 转换周期:0.5ms;
(3) 供电电压:1.5~3.6V,电流0.6uA;
(4) 工作压力单位0~30bar,使用环境温度范围-20~+85℃;I2C接口;
4. 九轴陀螺仪芯片(主控板集成):
(1) 以数字形式输出9轴旋转矩阵、四元数(quaternion)、欧拉角格式(Euler Angle forma)的融合演算数据(需DMP支持)
(2) 集成16位分辨率,量程为:±250、±500、±1000°与±2000°/sec 的3轴角速度传感器(陀螺仪)
(3) 集成16位分辨率,量程为:±2g、±4g、±8g和±16g的3轴加速度传感器
(4) 集成16位分辨率,量程为:±4800uT的磁场传感器(磁力计)
(5) 自带数字运动处理(DMP: Digital Motion Processing)引擎可减少MCU复杂的融合演算数据、感测器同步化、姿势感应等的负荷
(6) 自带一个数字温度传感器
(7) 可编程数字滤波器
(8) 支持SPI接口,通信速度高达20Mhz
(9) 自带512字节FIFO缓冲区
(10) 400Khz的IIC通信接口
5. 螺旋桨推进器及电调
电调信号发生器发送控制命令到驱动器,驱动器根据收到的参数控制推进器的转速和转向。
(1) PWM波频率:50Hz(20ms)
(2) 中点停转:占空比7.5%,高电平脉宽1500us
(3) 反转:高电平脉宽1100 - 1500us
(4) 正转:高电平脉宽1500 - 1900us
(5) 停转区间:高电平脉宽1475us - 1525us
6.蓄电池及电源管理系统
采用12V/40Ah锂电池做为航行器蓄电池。
7. 推进器
(三)ARM主控板软件结构和软件流程
ARM主控板软件的重点内容之一就控制板与服务器之间的网络通讯。我们采用LWIP开源代码实现网络通讯,将UCOSII开源代码、LWIP开源代码、MPU9250开源代码、OV5460开源代码作移植和融合成为一个完整的系统软件,并增加控制板外部接口、定时器、PWM、串行通讯、SDRAM等内部资源初始化软件,以及潜航器自平衡处理软件、服务器指令处理软件和运动控制软件等等。
软件框图如下:

加微信咨询
